



アンチとは何ですか-ドローンシステムとその仕組みは?
ドローン部門
技術の継続的な発展に伴い、ドローンの機能はますます強力になり、使用シナリオは多様化しています。
も深まり、 そしてその種類も多様化しています。
目的分類によると: ドローンは軍用ドローンと民間用ドローンなどに分けられます。現在、
70% のドローンは 使用済み 軍事目的のため。
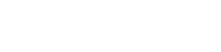
技術分類によれば、次のようになります。 ドローンは固定型に分けることができます-翼型ドローン、マルチ-ロータードローン、無人ヘリコプター、
はためく-翼型ドローン、 無人飛行船など。
サイズ分類によると: ドローンは超小型ドローン、軽量ドローン、小型ドローン、大型ドローンなどに分類できます。
ミッション高度分類によると: ドローンはウルトラに分類できます-低い-ドローン、低高度-高高度ドローン、
中くらい-高高度ドローン、 高い-高高度ドローンとウルトラ-高い-高高度ドローンなど。
活動半径の分類によると、ドローンはウルトラに分類できます。-短い-射程距離の短いドローン-レンジドローン、
短い-射程距離ドローン、中型-範囲 ドローンと長い-レンジドローンなど。
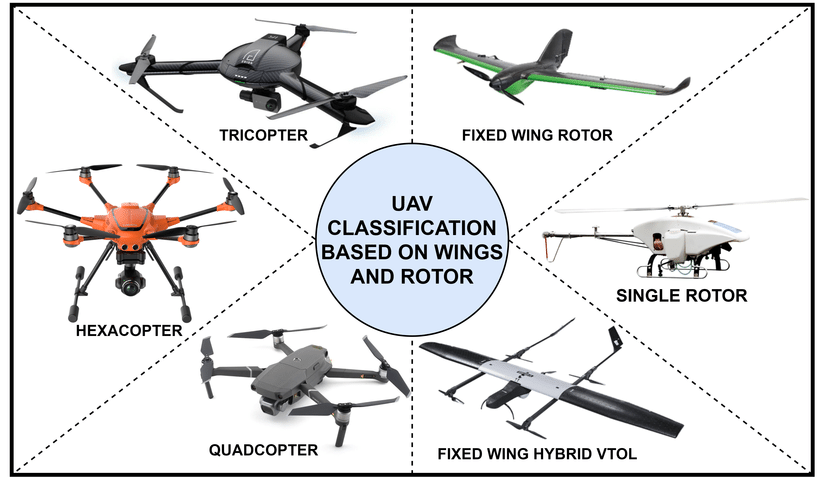
マルチの動作原理-ロータードローン
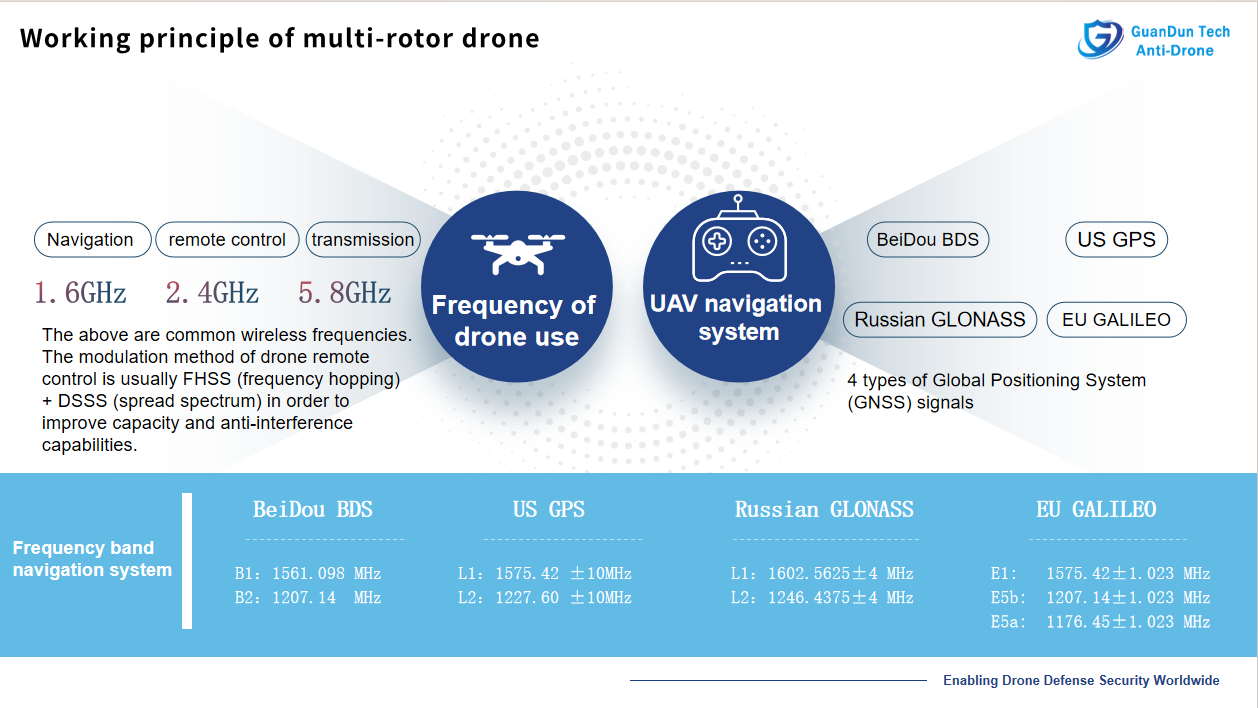
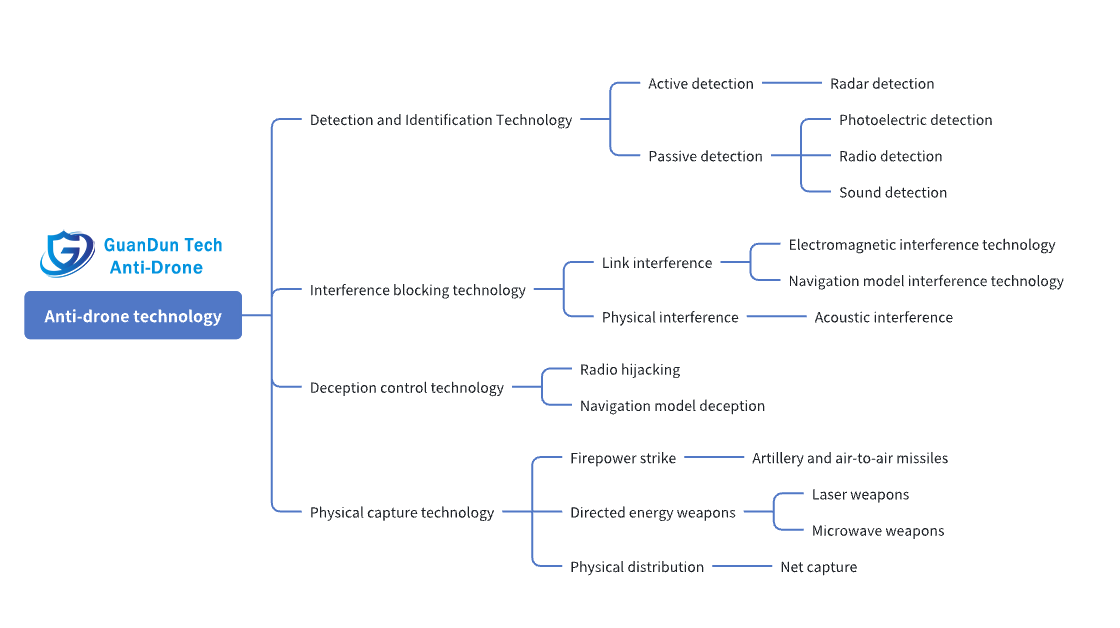
アンチ-ドローンシステム技術
ドローン検知技術 - レーダー
レーダーは、主に空中の移動目標を検出するために従来の防空の分野で広く使用されており、そのほとんどがレーダーを採用しています。
パルスドップラー技術。 従来の大型航空機は高速かつ高高度で飛行するため、航空機の速度検出閾値は
レーダーは高く設定されており、探知範囲は高高度に集中しています。しかし、小型ドローンはサイズが小さく、速度が遅く、飛行します。
低い高度で。それらは典型的な「低く、遅く、小さい」標的特性を持っていますが、これは困難です 従来の防空レーダー用
検出する。 したがって、「低速、低速、小型」ドローンを検出するために設計されたレーダーの速度検出しきい値は低くなります。で
同時に、使用周波数帯域 の方が高く、ほとんどが X を使用します-バンドとクー-バンド。
レーダーの主な利点は、昼夜を問わず機能し、さまざまな場所でドローンの検出と追跡に使用できることです。
気象条件 (夜、雨、霧など。)。欠点は対象物の認識能力が低く、認識できないことです。
ターゲットがドローンターゲットであるかどうかを判断します。
従来のシングル-機械のトランシーバーレーダーは電磁信号を外部に放射する必要があるため、
周囲の電磁気 環境が悪く、都市部での使用には適していません。
外部放射線源レーダーは、非放射線源からの放射線信号のエコーを使用します。-地上無線などの協力的なサードパーティ
局とテレビ局 ターゲットによって散乱された後、ターゲットの情報を取得します。都市部での使用にも適しており、
ただし、マルチパス効果などの要因の影響を受け、 検出精度が低い。
UAV検出技術 - 光電検出
光電検出では、主に可視光センサーと赤外線センサーを使用してターゲットを検出し、画像化します。その主な利点は、
直感的に提供できる オペレーターに画像情報を提供し、ターゲット識別の主な手段として使用できます。
ターゲットを検出した後、光電検出装置はターゲットを自動的にロックし、継続的に追跡します。
光電検出の主な欠点は、視野の大きさと自律探索によって制限されることです。
効率が低いです。同時に気象環境にも大きく影響され、検出性能が低下します。
雨や霧の天気では特に顕著です。同時に、複雑なバックグラウンド環境では、ターゲットを失いやすくなります。
不連続な追跡に。
現在、ビデオインテリジェント処理技術は急速に発展しています。画像認識技術により光電変換が可能に
ドローンターゲットを自律的に識別し、システム全体の自動化レベルを向上させ、また、
その後の自動操作と防御全体の保護の基礎-ドローンシステム。
ドローン検知技術 - 無線検出
電波探知とは、計測・制御や画像を検知することでドローンのターゲットを探知することです
ドローンの送信信号。電波探知装置は目標を探知・発見する機能だけでなく、
しかし、一定のターゲット認識も持っています 能力。
信号特性を分析することで受信信号を識別し、ドローンによる測定かどうかを判断できます。
そしてコントロールしたり、 画像伝送信号。同時に、一般的なドローンモデルのターゲット信号特性のデータベース
確立することができる。その後 信号が検出され、データベース内の特徴的な信号と比較および分析できます。
の特定のタイプとモデルを識別するため ターゲットのドローン。
現在、市場で一般的な消費者向けドローンのほとんどは 2.4 GHz と 5.8 GHz の周波数帯域を使用しています。
私の国の工業情報技術省が発行した「ドローンシステムの周波数の使用」
と規定している 840.5MHz~845MHz、1430MHz~1444MHzと2408MHz~2440MHzの周波数帯域は、
ドローンパイロット航空機システム。
840.5MHz~845MHzの周波数帯域は、ドローンシステムのアップリンクリモコンリンクに使用できます。
841MHz~845MHzも可能です アップリンクのリモコンとダウンリンクのテレメトリ情報の送信に時分割で使用されます。
ドローンシステムのリンク。
1430MHz~1446MHz の周波数帯域は、UAV システムのダウンリンク テレメトリおよび情報送信リンクに使用できます。
の 1430MHz~1434MHz の周波数帯域は、まず警察の UAV とヘリコプターのビデオ送信に使用する必要があります。必要に応じて、
1434MHz~1442MHzは可能 警察のヘリコプターのビデオ送信にも使用されます。 UAV が都市部に配備される場合、その頻度は
1442MHz以下の帯域を使用する必要があります。
2408MHz~2440MHzの周波数帯域はUAVシステムのダウンリンクに使用できます。ラジオ局が稼働しているときは、
他に影響を与えないものとします 合法的な無線サービスを利用したり、電波干渉から保護したりすることはできません。
同時に、ほとんどの民間消費者は、-グレードの UAV は、空き ISM 周波数帯域を通信周波数として使用します。
ISM 周波数帯域は国際電気通信連合によって定義されており、主に産業用、
科学機関と医療機関 自由に使用できます。電波管理庁の許可は必要ありません。
ドローン通信に適した ISM 周波数帯域は、主に次のようなマイクロ波帯域です。~434.79MHz、
902~928MHz、 2.400~2.4835GHz、5.725~5.875GHz。
愛好家の中には個人的にドローンを組み立てて横断する人もいます-アマチュア無線周波数帯域を使用するカントリードローン
国が指定した 無線管理部門はドローンの飛行制御や映像送信の頻度として
コミュニケーション、主に2つに集中 周波数帯域: 430MHz~440MHzと1260MHz~1300MHz。
要約すると、ドローン探知機器が満たす必要がある一般的な動作周波数帯域は次のとおりです。
430MHz~440MHz、840.5MHz~845MHz、902MHz~928MHz、1260MHz~1300MHz、1430MHz~1444MHz、
2.400GHz~2.4835GHz、5.725GHz~5.875GHz
通常、単一の電波探知装置は測定機能のみを備えています。複数の電波検出装置を使用可能
と連携して クロスでターゲットを特定する-TDOA テクノロジー システムの測位または使用。
無線探知は、電磁信号を外部に放射せず、
周囲に干渉する 電磁環境。
欠点は、周囲の電磁環境や電磁波の影響を大きく受けることです。
検出精度は高くありません。
プロトコルクラッキング
無線信号を収集した後、ドローン信号は正確に復調され、周波数などのアルゴリズムによって解読されます。
下-変換、アナログ-に-デジタル変換、フィルタリング、逆拡散、復調、デコードを経て、プロトコルが解読されます。
リンク層、ネットワーク層、アプリケーション層、解凍と復号化などが含まれます。
背中まで伝わる-ネットワークを介して端末処理プラットフォームサーバーに送信され、端末処理プラットフォームサーバーが識別します
受信したドローン信号を受信し、疑わしいドローン無線信号の特性を分析し、それを分析して照合します。
クラッキング プロトコル データベースの特徴を正確に識別します。信号がホワイトリストに属している場合、警告も防御も行われません
が実行されます。信号がホワイトリストにない場合、システムは自動的に警告します。
メッセージの解析
メッセージ解析とは、受信したドローンによって送信されたメッセージを解析して、そこから有用な情報を抽出することを指します。
ドローンメッセージには通常、ドローンの位置、速度、姿勢、バッテリー残量などの関連情報が含まれます。
ドローンのメッセージを解析すると、ユーザーがドローンのステータスを理解し、対応する制御や決定を行うのに役立ちます。
ドローン検知技術 - 音の検出
音検知は、ドローン飛行時のプロペラの回転音を検知することでドローンのターゲットを検知します。そのコア技術
音です 認識、主検出周波数は 0.3kHz~20kHz。既存のドローンオーディオデータベースと一致し、
サウンドプリントを抽出します ドローンのプロペラ回転音の特徴を活かしてターゲットを識別します。
この技術は近接用途に適しています。-静かな環境では距離検出を行うため、検出距離の精度が低下します。
騒がしい中で 都市の背景環境。マイクアレイは主にリニアフォーの形式で提供されます。-配列と球面
配列。主なポジショニング アルゴリズムにはクロスが含まれます-パワースペクトル方式、TDOA方式など 現時点でのベストな組み合わせは
球面アレイとTDOA法。現在、音検出は光電検出の補助手段として主に使用されており、
単一の検出源としてのパフォーマンスは劣ります。
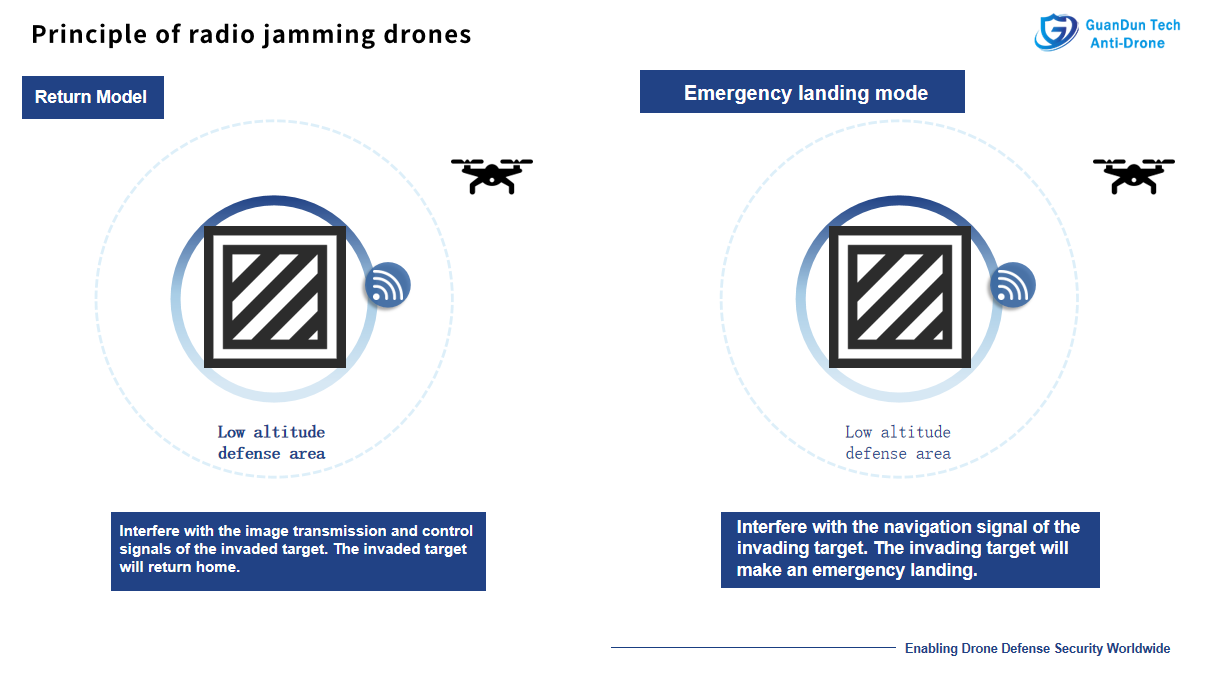
ドローン妨害技術-リンクジャミング
アンチドローンは一般に、「ソフトキル」と「ハードダメージ」の 2 つのカテゴリに分類できます。
ソフトキルとは、電子干渉、ナビゲーション欺瞞、その他の手段を使用してドローンを攻撃できなくすることを指します。
普通に仕事をするために、 それによりドローンの脅威を軽減します。 「ハードダメージ」とは、物理的ダメージを与えて行動を不能にし、
落下するドローン、 それによって排除する ドローンの脅威。
ドローンの計測・制御リンクが妨害され、ドローンは制御情報や位置情報を失う
そしてナビゲーションリンク。 ほとんどのドローンは独自の安全保護メカニズムを設計しています。制御情報が
ナビゲーション情報が失われると、 ドローンは実行中のミッションを中断し、ホバリング、旋回、または帰還します。
現在、電波干渉は主に高いものを採用しています。-干渉をブロックする電力ブロードバンドと干渉周波数
をカバーします 300MHz~6GHz 周波数帯域、一般的なドローンの計測と制御およびナビゲーション周波数をカバー
バンド。電波干渉 機器には、固定機器または手持ち式のポータブル機器があります。
現在、ポータブル無線干渉装置は、日常の無線干渉防止装置として最も広く使用されています。-ドローンの保護。
近年ではポータブルな
干渉装置も継続的に開発されています。単一の干渉関数に基づいて、検出
そしてアラーム機能補助オペレーターがドローンターゲットを検出できるようにする機能も追加されました。
ドローン妨害技術 - 音響妨害
音響干渉技術は、ドローンのジャイロスコープと同じ周波数の音波を放射し、ジャイロスコープの故障を引き起こします。
共鳴する エラー情報を出力し、対象ドローンの安定飛行を妨げ、最終的には故障に至る可能性があります。
普通に飛んで墜落する。
音響干渉技術により、対象となるドローンが空中でホバリングしたり、着陸したり、帰還したりする可能性があります。最初の 2 つの応答については、
モード、安全性 問題は最優先で扱われなければなりません。人口密集地域や都市環境では、避難する必要があります。
地上の群衆と清掃 できるだけ早く地上設備を整備してください。空中にホバリングしているドローンの場合は、揚力を使用して捕捉できます。
設備や網技術。
現在、この技術はまだ理論的な研究開発段階にあり、その際に発生する減衰の問題は解決されていません。
伝播 音波の発生は今後解決すべき技術課題となる。
ドローン妨害技術 - 欺瞞の制御
無線信号ハイジャック
電波ハイジャック技術とは、ドローンのリンク信号や通信プロトコルを解析し、その解析結果を利用する技術です。
結果を 自律的に欺瞞信号を生成し、それをリンク端末に注入して、
ターゲットのドローン。無線信号ハイジャックは、国内のドローン対策の分野では比較的進んだ技術です。その進歩は、
その高さがより反映されています 技術的な難しさと汎用性の低さ。科学技術の絶え間ない発展に伴い、
ドローン通信プロトコルと 暗号化アルゴリズムも常にアップグレードおよび改善されており、暗号化の難易度はますます高くなっています。
ドローン通信プロトコルのクラッキングは徐々に進んでいる 増加しています。
現在の制限は主に技術的な構築と実装の難しさによるものであり、普及を促進することが困難です。
そして大規模に使用します。ドローンごとに必要なクラッキング方法も異なります。通信リンクが専門的な方法で保護されている場合
テクノロジー、 彼らはこの欺瞞制御技術に最大限抵抗できるかもしれない。
強さ: 独立して動作し、損傷することなくドローンを捕捉できます
弱点: 対象は普遍性に乏しく、技術的難易度が高く、信号クラッキングの難易度が高く、推進や普及が難しい。
使用 大規模に
ナビゲーションの欺瞞
高いものと比べると-電波干渉、ナビゲーション欺瞞の電力抑制は賢明な処分方法です。
ナビゲーション スプーフィング技術は、受信した UAV ナビゲーション信号に対して時間変調とドップラー変調を実行して、偽の信号を与えることです。
ナビゲーション 情報を盗み出し、なりすまし信号によりナビゲーション端末が誤った位置に位置するように誘導し、欺瞞する。
リターンポイントと ターゲット UAV の軌道。
ドローン妨害技術 - ハードキル
砲兵と対-航空機のミサイル技術は伝統的な防空モードに属し、ドローンを攻撃するために一般的に使用されます。
この技術的手段は、飛行重量が重く飛行高度が高いドローンを破壊するために使用できます。
ドローン技術の継続的な開発とアップグレードにより、現代の防空システムの精度も向上しています。
ガイダンス、 過去の防空システムに基づいた電子干渉およびその他の技術を備えており、目標を探知する能力を持っています
そしてトラックガイダンス。既存の防空兵器システムはドローンに対してある程度対抗できるものの限界もあり、
主に反映されているのは、 マルチの難易度-標的戦闘は、ドローンクラスターの戦闘ニーズを満たすことが困難であり、
「低い、遅い」という言葉が広く使われている 小型無人機、大砲と対空砲のコストが高い-航空機ミサイルは実現が難しい運命にある
主な対策。高い-エネルギーレーザー兵器は、新しい概念の兵器であり、指向性エネルギー兵器の一種です。機能しています
原則は高いものを使用することです-エネルギーレーザードローンを燃やすため。この方法は主に、より強力なドローンに対処するための戦闘シナリオで使用されます。
武器を携行するなどの脅威や危険な行為 電子干渉やナビゲーションによって取り扱うことができない物品やドローン
ドローンが保護区域に入らないようにするための欺瞞 エリアに存在し、脅威となることはできません。従来の火力攻撃兵器には、
ドローン攻撃時の効率の低さとコストの高さの問題。
従来の火力攻撃兵器と比較して、レーザー兵器は発射速度が速く、迎撃が低いという特徴があります。
コストが高くて高い 打撃精度。それらはコストです-ドローンを攻撃し破壊する効果的な手段。しかし、レーザー兵器は非常に
天候に影響される 電子妨害装置に比べて全体的なコストが比較的高くなります。
マイクロ波兵器技術は、高濃度の、-短時間でパワーと指向性マイクロ波ビームを通過させます。
方向性のある 電磁波の放射。ドローンの航空機搭載機器の内部に入り込み、電子機器を物理的に破壊します。
コンポーネント、作成 それらは無効または無効になり、それによってターゲットのドローンに損傷を与えます。
マイクロ波兵器は、世界中のさまざまな国における軍事研究の重要な分野の 1 つです。通常は干渉するために使用されます
と 遠距離では軍事目標や兵器の光電子機器を使用し、近距離では生きた目標を殺害します。その中で、
高い-力 マイクロ波兵器はソフトおよびハード殺傷機能を統合しており、戦略的防御または戦術的迎撃に使用できます。
彼らは生産できる 異なる出力密度で異なる効果を実現し、ドローンカウンターを実現します。-検出、追跡、および検出の能力を測定する
同じように破壊 このシステムは、優れた軍事的展望と戦闘上の利点を備えています。
ドローン妨害技術 - ネットキャプチャー
ネッティング技術とは、ドローンをローターに巻き付けて捕獲し、ミッションエリアから持ち去る技術です。ドローンの場合、
運ぶかもしれない 危険な品物は、巻き添え被害を与えることなく安全に処分できるよう安全な場所に運ばれます。
「低速・低速・小型」ドローンは比較的コストが低いため、相手がマルチを採用した場合、-バッチ、分散アプローチであれば、
増やす 防御側に防御圧力がかかるため、戦闘コストが増加し、防空経路が非常に飽和状態になります。
そのため、ドローンに対するダメージ・捕獲技術には、従来の火力ダメージ技術に加えて、
レーザー兵器 技術、マイクロ波兵器技術、網技術。この種の技術を使用することで、アンチドローン
装置が効率的に形成できる 地面-に-空爆ネットワークを構築し、火力破壊と標的ドローンの捕獲を実行します。
提供された諜報情報に基づく 偵察諜報システムによって。
前の: ドローンとアンチの開発動向-グローバルセキュリティの観点から見たドローンテクノロジー
次: もうない